
Protocolli
|
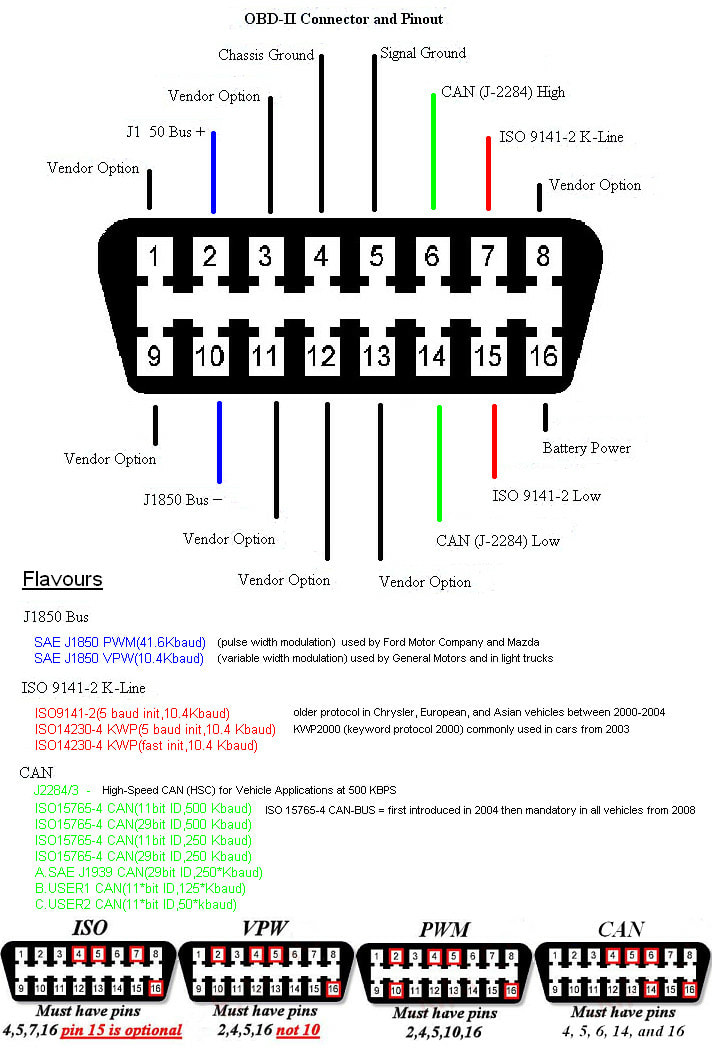
Come potete osservare, all'interno troviamo vari nomi di protocolli diversi, in base all'auto viene utilizzato uno dei protocolli disponibili (non tutti quanti). I protocolli di comunicazione principali (OBD II) in totale sono 5, senza contare i derivati. Il connettore e' sempre lo stesso, e' il protocollo utilizzato che varia in base al modello del veicolo. Ogni protocollo ha il proprio metodo di inizializzazione, la sua velocita' di trasferimento dati e la sua tensione di lavoro del segnale dati. I pin di alimentazione sono uguali per tutti i protocolli.
Con le conoscenze a disposizione potete auto-costruirvi un piccolo computer di bordo utilizzando Arduino, e' un progetto utile ed interessante. 
|
Protocollo |
Velocita' |
Pin |
Utilizzo |
Tensione Segnale |
Inizializzazione |
SAE J1850 PWM |
41.6kbit/s |
PIN 2: BUS+ PIN 10: BUS- |
Ford |
0-5V |
No |
SAE J1850 VPW |
10.4kbit/s - 41.6 kbit/s |
PIN 2: BUS+ |
General Motors |
0-7V |
No |
ISO9141-2 |
10.4kbit/s |
PIN 7: K-Line PIN15: L-Line |
Europa, Chrysler, Asia |
Slow 5 Baud |
|
ISO14230/KWP2000 |
|
PIN 7: K-Line PIN 15: L-Line |
Europa |
0-12V |
|
ISO15765/CAN |
250kbit/s - 500kbit/s |
PIN 6: CAN HIGH PIN 14: CAN LOW |
Bosch, USA |
CANH: 3.5V CANL: 1.5V |
No |
